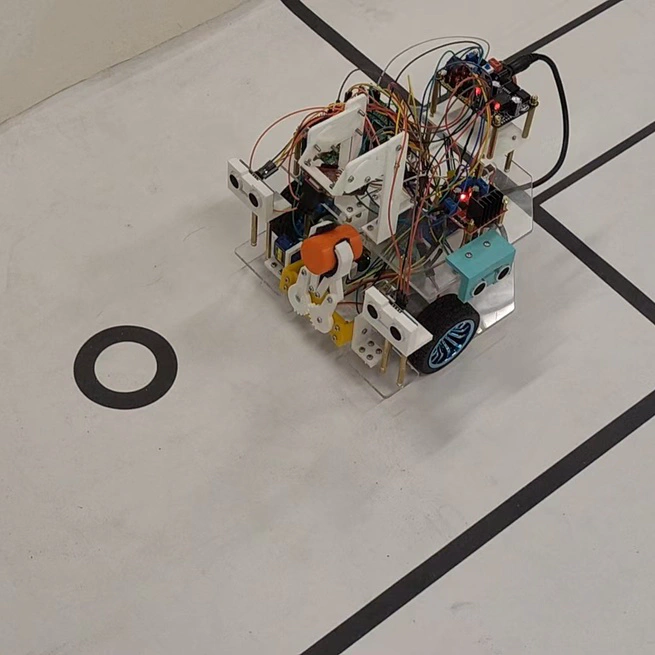
Explore the development of an intelligent vehicle capable of obstacle avoidance, line tracing, and object grasping, integrating efficient algorithms and hardware design.
Jul 30, 2024