🤖 Tsinghua AI Challenge:Real-Time Strategy and Space Simulation
Mar 20, 2024··
2 min read
Rongkui Zhang
Overview
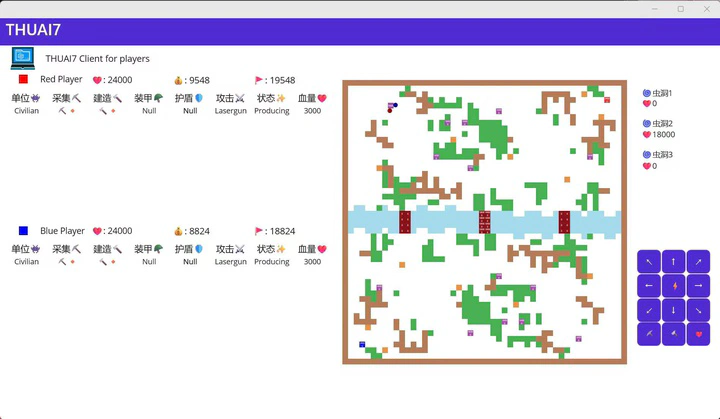
This project showcases the development of intelligent algorithms for controlling spacecraft in a real-time strategy simulation during the Tsinghua AI Challenge. The system integrates resource management, construction, and combat mechanics within competitive constraints, earning the Third Prize (Top 10%).
Competition Highlights
Gameplay Overview:
- Two teams compete in each match, played on four distinct maps.
- Objectives include constructing buildings, extracting resources, and destroying enemy bases.
- Each match ends when either:
- One team’s base is destroyed.
- The match duration (10 minutes) elapses.
- Scores are calculated after each match, and the team with the higher score wins.
Task Structure:
- Players control five characters (PlayerID 0–4), including:
- 1 Base (PlayerID 0): Acts as the team’s headquarters.
- 4 Ships (PlayerID 1–4): Divided into:
- Civil Ships: Maximum 2 per player.
- Military Ships: Maximum 2 per player.
- Flagship: Maximum 1 per player.
- Players control five characters (PlayerID 0–4), including:
Project Achievements
- Developed real-time algorithms in C++ for:
- Optimizing resource extraction from predefined points using AI-controlled paths.
- Managing the construction of buildings at strategic locations.
- Directing ships during combat using decision-making systems.
- Designed an adaptive navigation system with an A* pathfinding algorithm for optimal movement.
- Implemented combat strategies that leverage energy, positioning, and multi-agent coordination to eliminate enemies and protect assets.
Technical Architecture
State Machine Flow
graph TD
A[Start] -->|Identify Objective| B[Resource Collection]
A -->|Defend or Attack| C[Combat Management]
B --> D[Construction Planning]
D --> E[Base Protection]
C --> E
E -->|Victory Check| F[Match End]
Key Features:
- A Pathfinding*: Facilitates efficient movement across complex maps.
- Modular Communication:
- Implemented UART-based protocols for seamless real-time communication between agents.
- Multi-Agent Coordination:
- Integrated algorithms for dynamic role switching between offensive, defensive, and resource collection tasks.
Challenges and Solutions
- Resource Scarcity:
- Balanced team strategies to maximize resource extraction efficiency.
- Addressed potential contention through optimized task allocation.
- Navigation Obstacles:
- Enhanced pathfinding accuracy using map preprocessing and heuristic adjustments.
Thank you for exploring this project. Feel free to share your thoughts! 🙌