🚗Robotics Winter Camp, Intelligent Vehicle Project
Jan 20, 2023··
2 min read
Rongkui Zhang
Overview
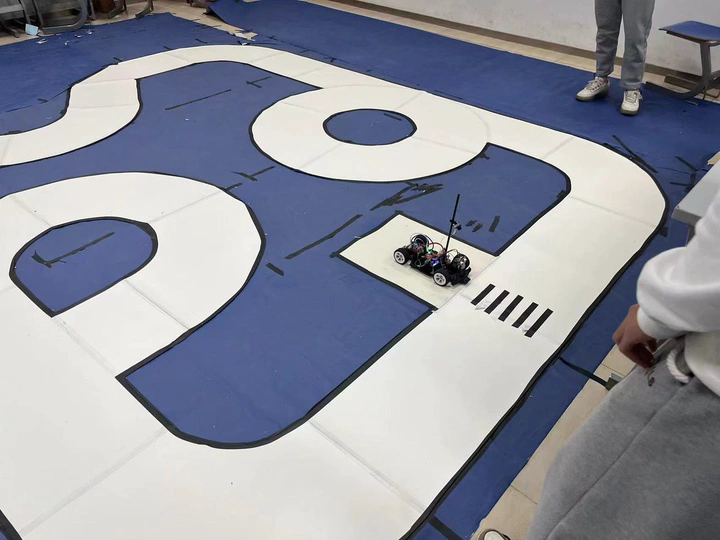
This project highlights the achievements of the Robotics Winter Camp at Tsinghua University, where we designed, programmed, and tested an intelligent vehicle system capable of autonomous navigation and obstacle avoidance. Under a competitive framework, our team earned the Third Prize (Top 10%) for innovative design and implementation.
Competition Highlights
Objective:
- Design an autonomous robotic car capable of completing tasks such as line tracing, roundabout navigation, and obstacle avoidance on a standardized track.
- Ensure integration of hardware and software for optimized performance.
Key Features:
- Intelligent start and stop using Bluetooth or sensors.
- Effective lane following through advanced image processing algorithms.
- Precise obstacle avoidance and detection using ultrasonic sensors.
Project Achievements
Hardware Design:
- Integrated essential sensors, including:
- Ultrasonic distance sensors for obstacle detection.
- Camera modules for visual guidance and line tracking.
- Developed a high-performance motion control system for smooth navigation.
- Integrated essential sensors, including:
Software Implementation:
- Implemented navigation algorithms using C programming.
- Enhanced vehicle autonomy with image thresholding and multi-point curve analysis.
- Achieved real-time lane detection with dynamic correction for unexpected conditions.
Flowchart: Task Workflow
graph TD
A[Start] -->|Detect Line| B[Line-Tracing Mode]
A -->|Obstacle Detected| C[Obstacle Avoidance]
B --> D[Roundabout Navigation]
C --> D
D --> E[End and Parking]
Challenges and Innovations
- Navigational Precision: Resolved challenges in sharp turn adjustments using PID control for motor and steering systems.
- Data Fusion: Combined inputs from multiple sensors (camera, ultrasonic, IMU) for a reliable decision-making framework.
- Scalable Design: Modular approach allowed easy replacement and testing of hardware components.
Thank you for exploring this project. Feel free to share your thoughts! 🙌