🚗 Intelligent Obstacle-Avoiding and Line-Tracing Car System
Jul 30, 2024··
2 min read
Rongkui Zhang
Overview
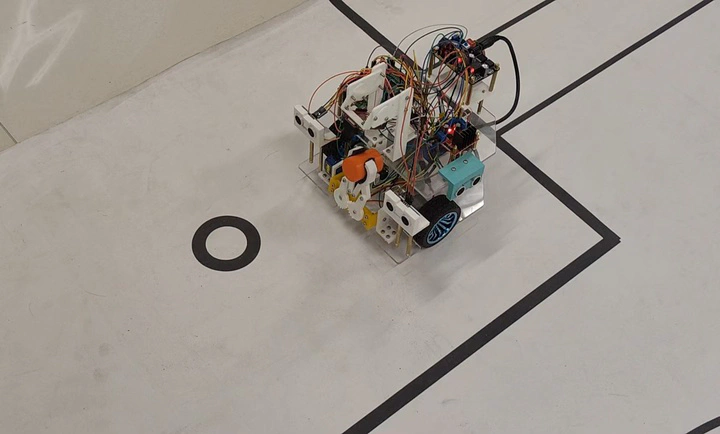
This project showcases the design and implementation of an intelligent vehicle system, developed to perform three complex tasks: line tracing, obstacle avoidance, and object grasping. The project integrates advanced software algorithms and innovative hardware structures, ensuring efficiency and flexibility in real-world applications.
Below are the videos demonstrating the intelligent vehicle’s line-tracing and obstacle-avoidance tasks.
Project Highlights
Line-Tracing Task:
- Leveraged OpenMV for image-based navigation along pre-defined tracks, using dynamic thresholding for accurate path detection.
- Developed PID-based speed control to maintain stability on sharp turns and narrow paths.
Obstacle-Avoidance Task:
- Implemented a hybrid algorithm using ultrasonic sensors and IMU data to detect and bypass obstacles while navigating toward the destination.
- Used precise wall-following techniques to avoid getting trapped in loops during obstacle avoidance.
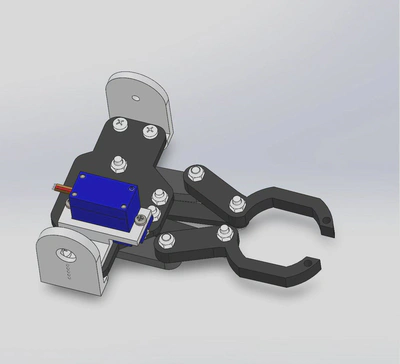
Object Grasping Integration:
- Designed a lightweight, adaptive gripper driven by SG90 servos, ensuring stability during transport.
- Integrated grasping and placing processes seamlessly into both line-tracing and obstacle-avoidance tasks.
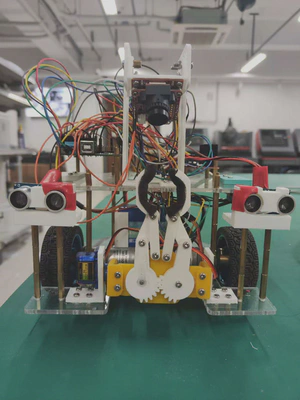
Hardware Design
- Constructed a two-layered chassis using 3D printing for efficient weight distribution, ensuring lightness and stability.
- Adopted two-wheel differential drive for high maneuverability, supported by a rear omni-wheel for balance.
- Integrated sensors (ultrasonic, IMU, OpenMV) with strategic placements for optimal data collection and processing.
Software Architecture
State-Machine Logic
graph TD
A[Start] -->|Detect Object| B[Grasp Object]
B --> C{Select Task}
C -->|Line Tracing| D[Line-Tracing Mode]
C -->|Obstacle Avoidance| E[Obstacle-Avoidance Mode]
D --> F[Detect Destination]
E --> F
F --> G[Place Object]
G --> H[End]
Key Features
- Utilized OpenMV for real-time image processing and object recognition.
- Communicated between modules using UART and Bluetooth protocols, ensuring real-time responsiveness.
- Enhanced task precision through the fusion of dynamic state transitions and control algorithms.
Innovations
- Developed a two-degree-of-freedom grasping mechanism, utilizing servo-driven claws with sponge linings for precision handling.
- Implemented LAB color space processing to reduce lighting-related inaccuracies during line tracing.
- Integrated adaptive algor56ithms to dynamically balance speed and accuracy for different tasks.
Challenges and Solutions
Line-Tracing Challenges
- Sharp Turns: Improved PID tuning to handle tight curves without losing track.
- Shadow Interference: Applied dynamic threshold adjustments to minimize errors caused by varying lighting.
Obstacle-Avoidance Challenges
- Sensor Interference: Reduced ultrasonic sensor cross-talk through time delays between pings.
- Navigation Deadlocks: Implemented wall-following corrections to bypass loop scenarios.
Thank you for exploring this project. Feel free to share your thoughts! 🙌